Topology and Geometry from Data
XIMENA FERNANDEZ
University of Oxford
Astrophysics Seminar
Nagoya University - 22 August 2024
Topology vs Geometry
Geometry = fine details + quantitative answers
Topology = fundamental properties + qualitative answers
Topological inference
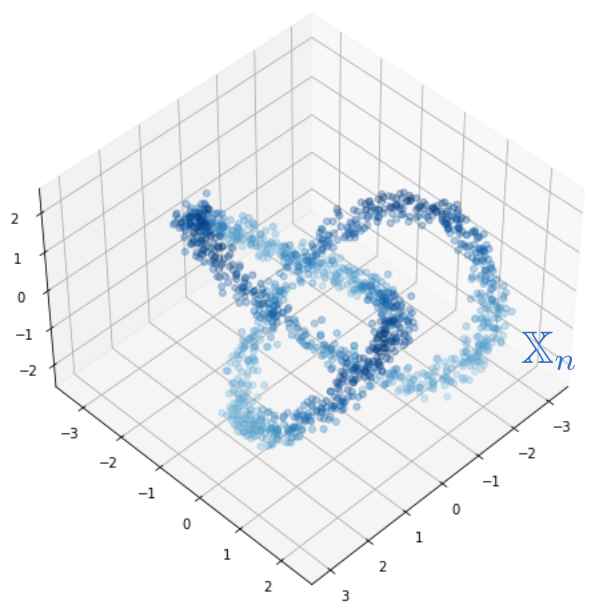
Let $X$ be a space and let $\mathbb{X}_n = \{x_1,...,x_n\}$ be a finite sample of $X$.
Q: How to infer topological properties of $X$ from $\mathbb{X}_n$?
Topological inference
Let $X$ be a space and let $\mathbb{X}_n = \{x_1,...,x_n\}$ be a finite sample of $X$.
Q: How to infer topological properties of $X$ from $\mathbb{X}_n$?
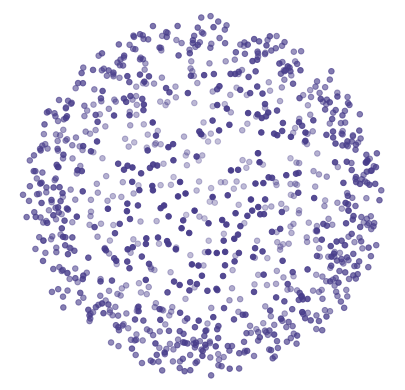
Point cloud
$\mathbb{X}_n \subset \mathbb{R}^D$

For $\epsilon>0$, the $\epsilon$-thickening of $\mathbb{X}_n$:
\[\displaystyle U_\epsilon = \bigcup_{x\in \mathbb{X}_n}B_{\epsilon}(x)\] 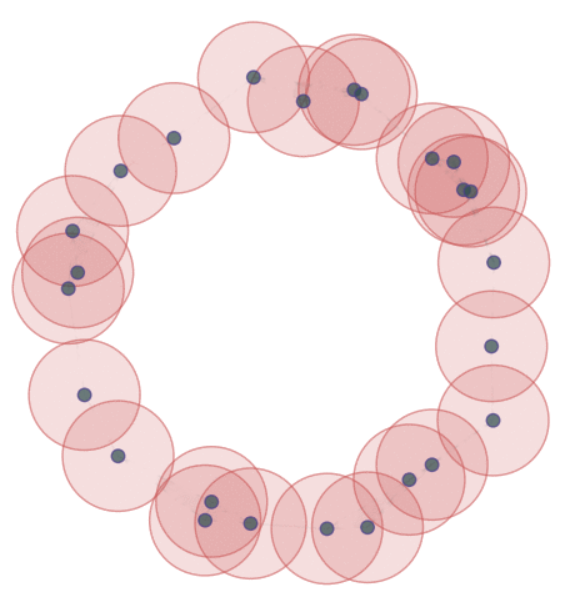
Topological inference
Let $X$ be a space and let $\mathbb{X}_n = \{x_1,...,x_n\}$ be a finite sample of $X$.
Q: How to infer topological properties of $X$ from $\mathbb{X}_n$?
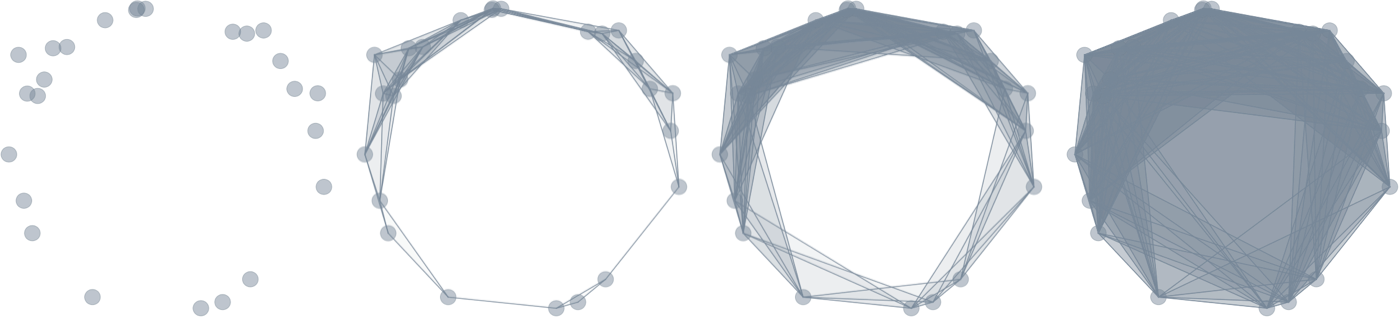
Point cloud
$\mathbb{X}_n \subset \mathbb{R}^D$
Evolving thickenings

Topological inference
Let $X$ be a topological space and let $\mathbb{X}_n = \{x_1,...,x_n\}$ be a finite sample of $X$.
Q: How to infer topological properties of $X$ from $\mathbb{X}_n$?
Point cloud
$\mathbb{X}_n \subset \mathbb{R}^D$
Evolving thickenings
Filtration of simplicial complexes
Topological inference
Let $X$ be a topological space and let $\mathbb{X}_n = \{x_1,...,x_n\}$ be a finite sample of $X$.
Q: How to infer topological properties of $X$ from $\mathbb{X}_n$?
Point cloud
$\mathbb{X}_n \subset \mathbb{R}^D$
Filtration of simplicial complexes
Persistence diagram

Topological inference
Topological inference

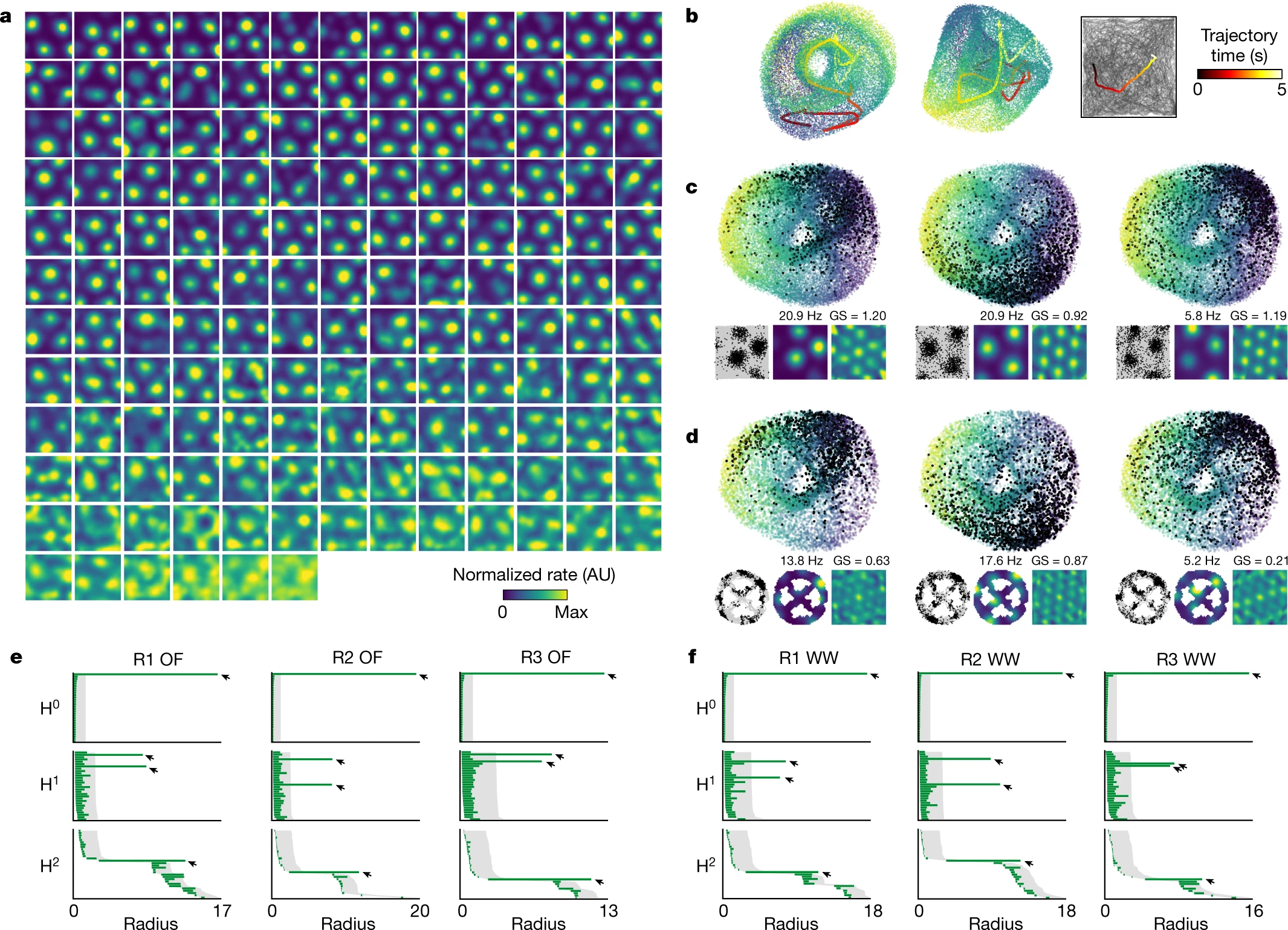
Applications
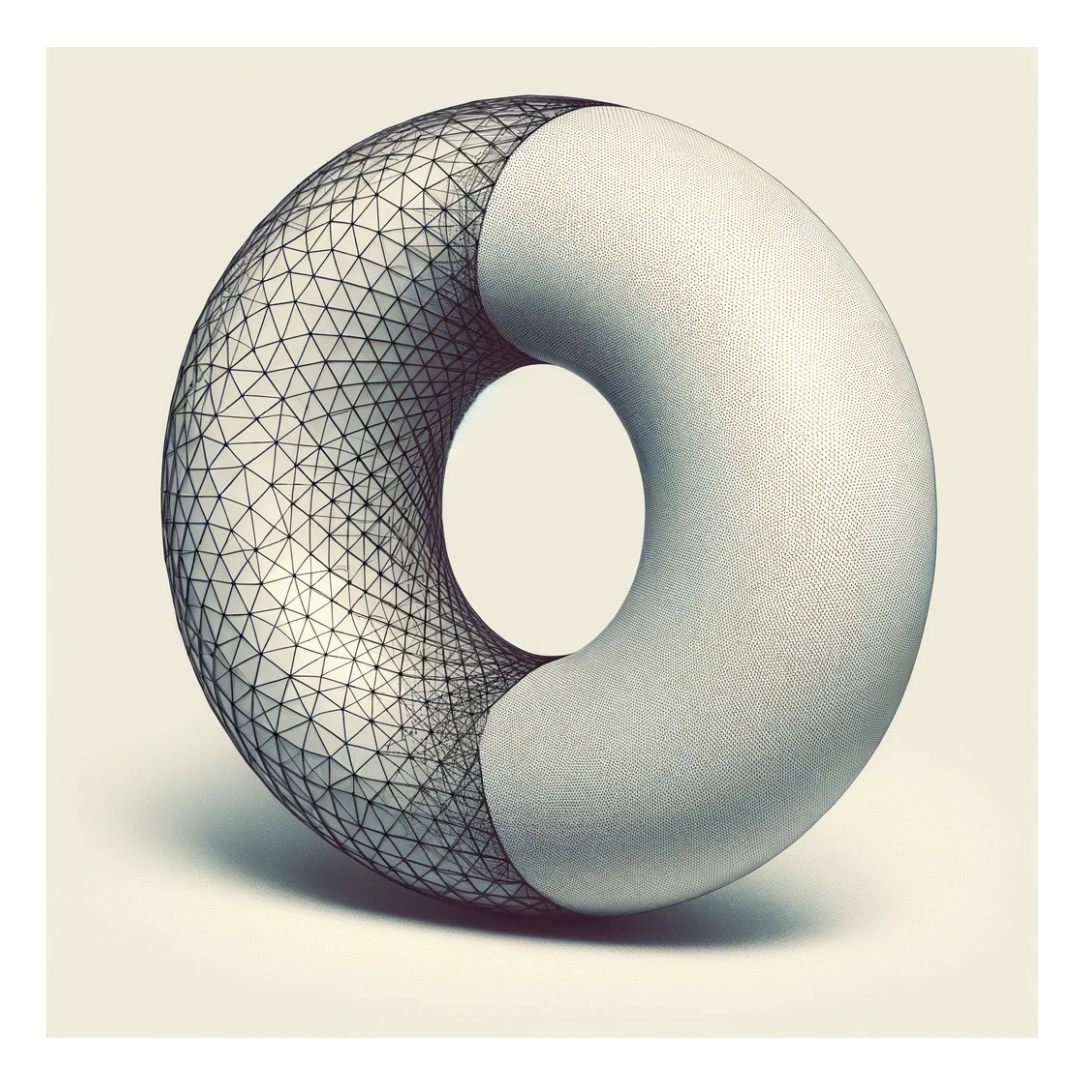
Gardner et al. 'Toroidal topology of population activity in grid cells'. Nature. (2022)
Applications
Reise, Fernandez, Dominguez, Harrington, Beguerisse-Diaz. 'Topological fingerprints for audio identification'. SIAM Journal of Data Science (2024)

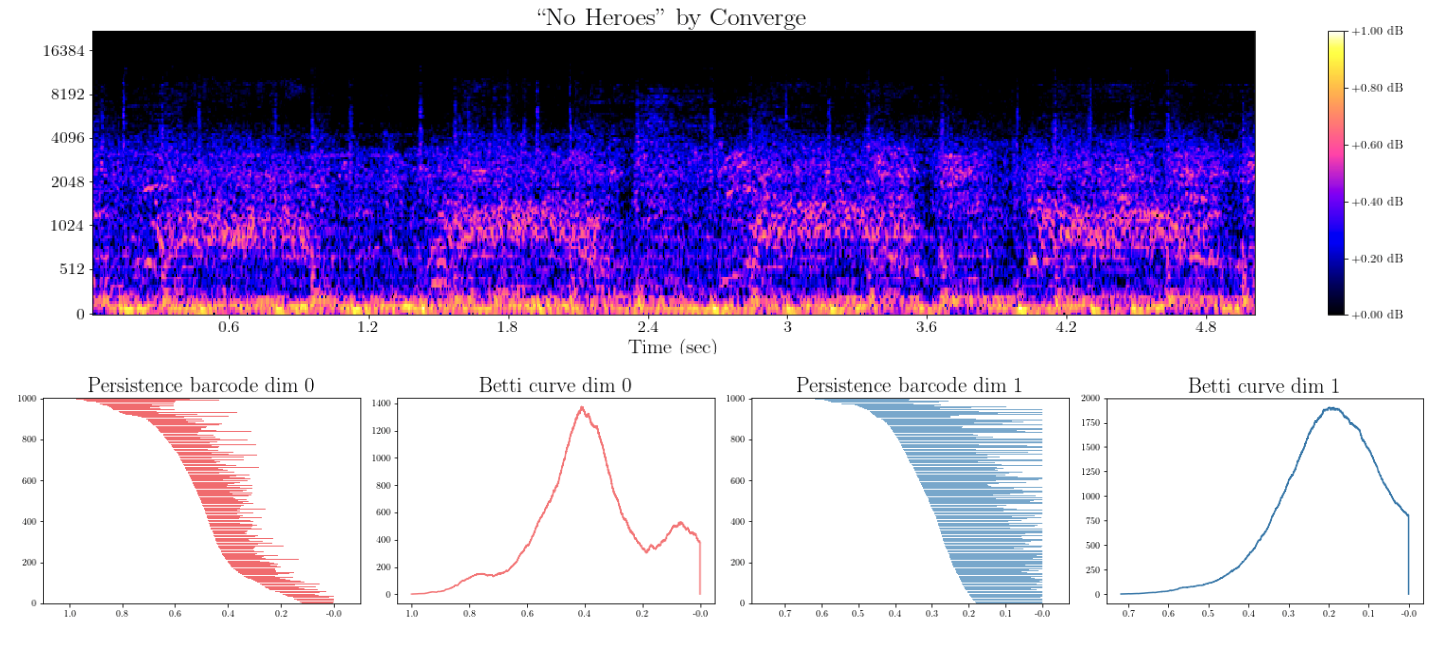
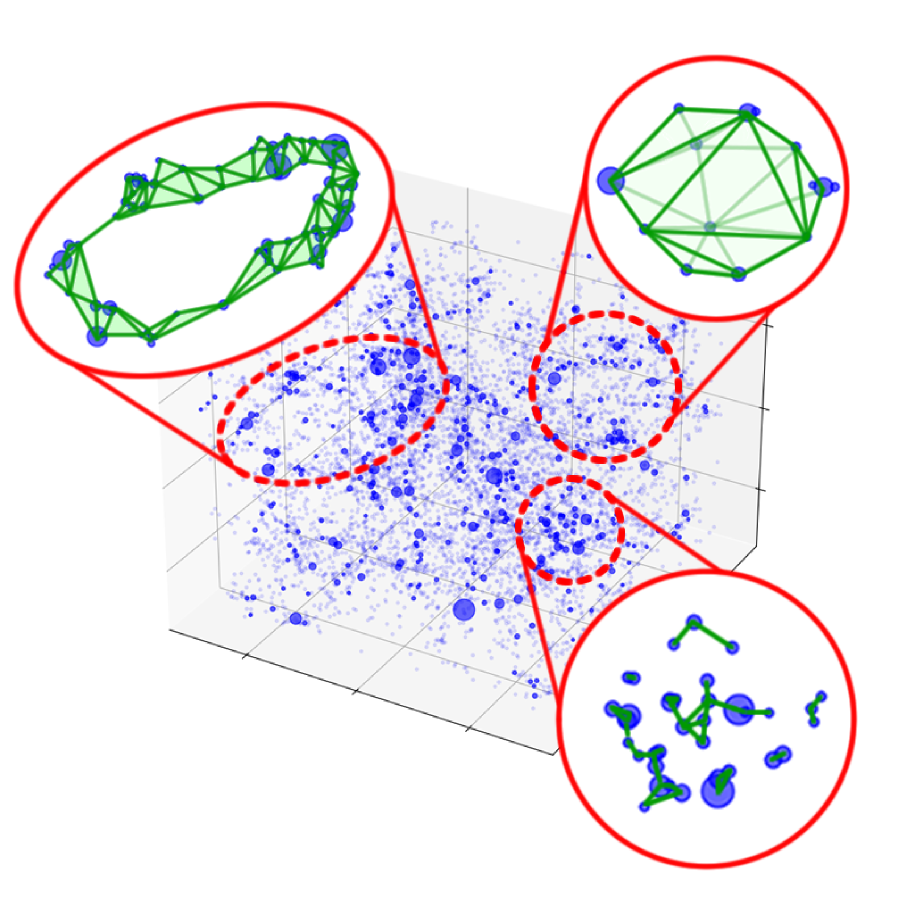
Applications
Reise, Fernandez, Dominguez, Harrington, Beguerisse-Diaz. 'Topological fingerprints for audio identification'. SIAM Journal of Data Science (2024)






 $~~~~$
$~~~~$





$~~~~~~~~~~~~~~~~t_0~~~~~~~~~~~~~~~~t_1~~~~~~~~~~~~~~~~t_2~~~~~~~~~~~~~~~t_3~~~~~~~~~~~~~~~t_4~~\dots~~~~~~~~~~~~~~~~~~t'_0~~~~~~~~~~~~~~~~t'_1~~~~~~~~~~~~~~~~t'_2~~~~~~~~~~~~~~~~t'_3~~~~~~~~~~~~~~~t'_4~~\dots$

Applications
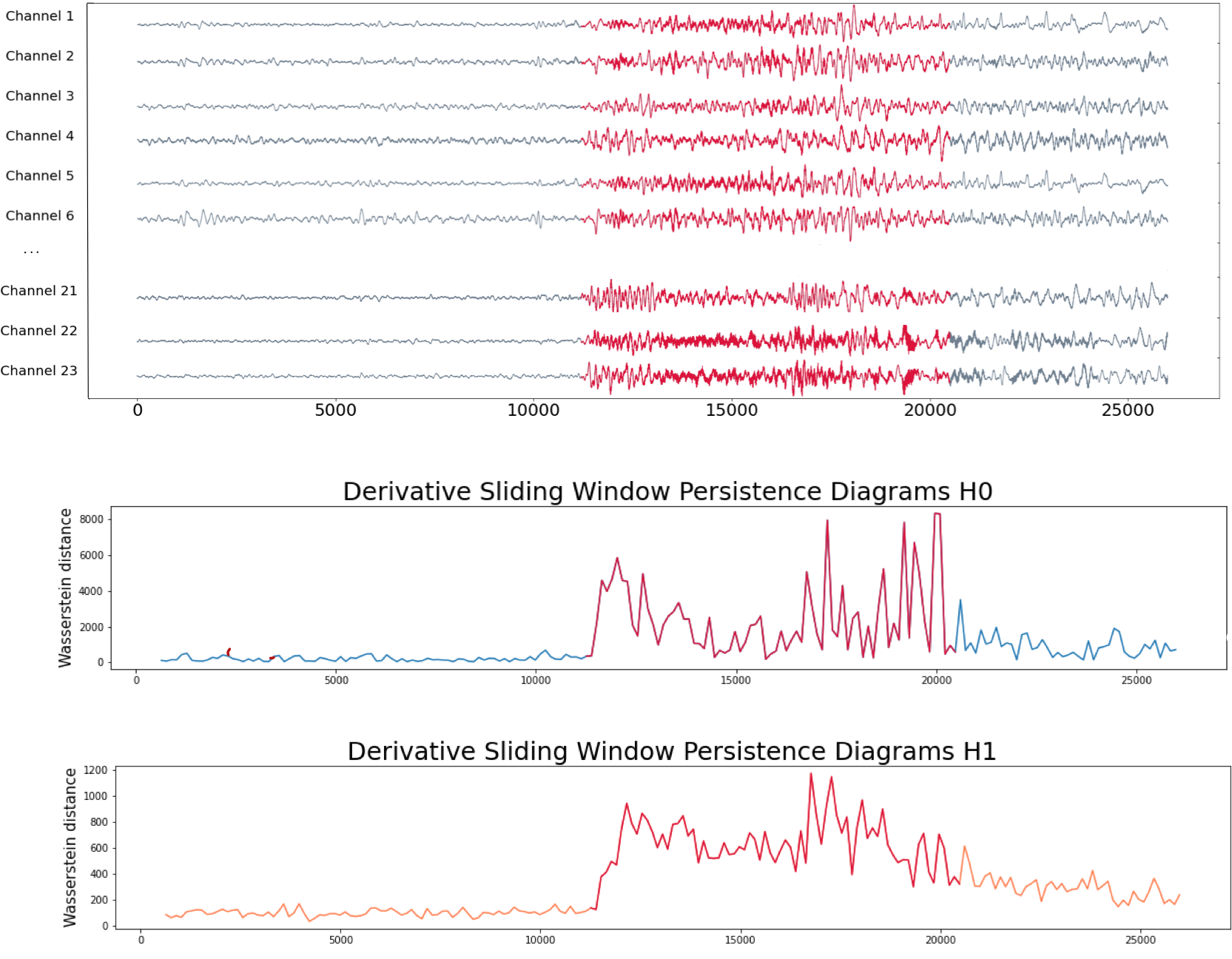
Fernandez X., Mateos D. 'Topological biomarkers for real-time detection of epileptic seizures'. Preprint (2024)
Persistent homology
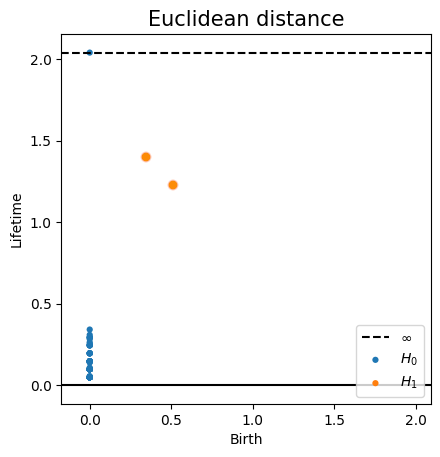
Persistent homology
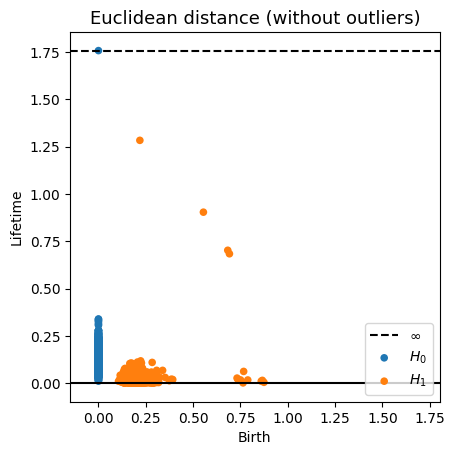
Metric space: $(\mathbb X_n, d_E)\sim (\mathcal M, d_E)$
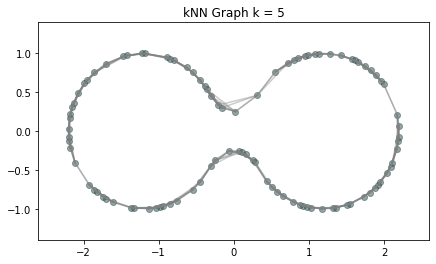
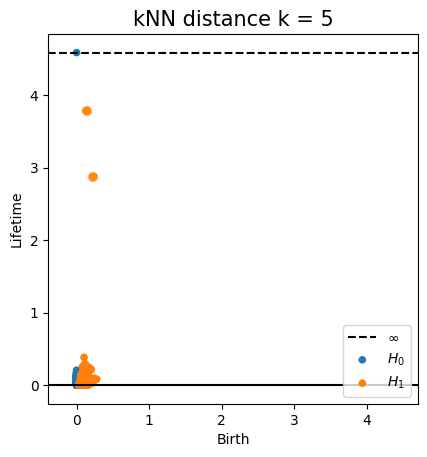
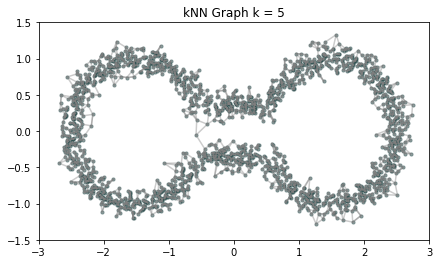
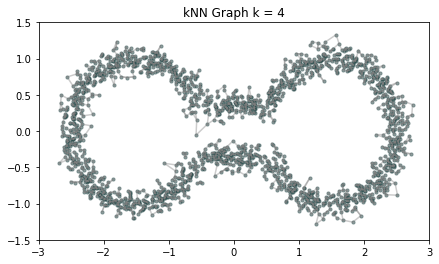
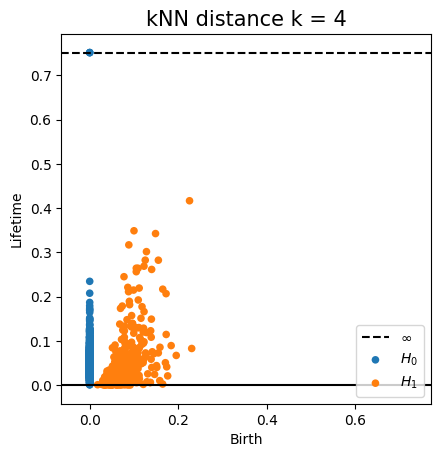
Persistent homology
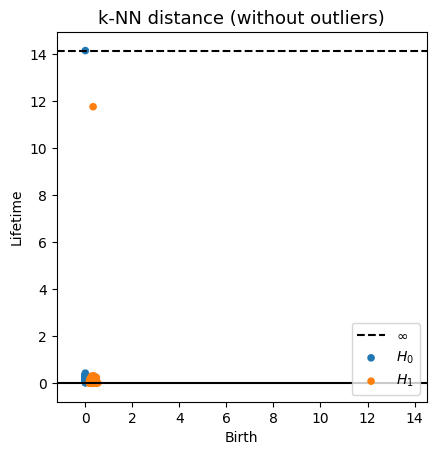
Metric space: $(\mathbb X_n, d_{kNN})\sim (\mathcal M, d_\mathcal{M})~~~$(Bernstein, De Silva, Langford & Tenenbaum, 2000)
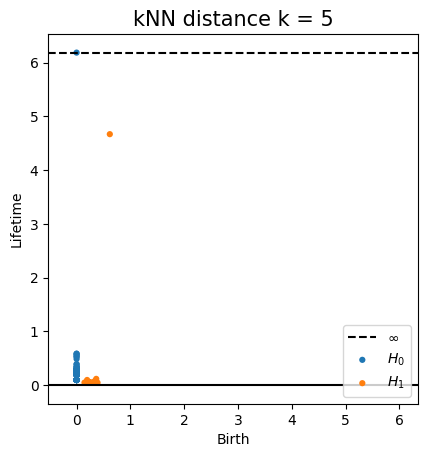
Persistent homology
Metric space: $(\mathbb X_n, d_{kNN})\sim (\mathcal M, d_\mathcal{M})$
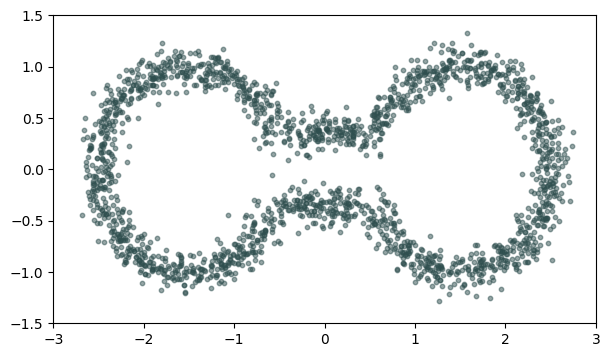
Persistent homology
Metric space: $(\mathbb X_n, d_{kNN})\sim (\mathcal M, d_\mathcal{M})$
Persistent homology
Metric space: $(\mathbb X_n, d_{kNN})\sim (\mathcal M, d_\mathcal{M})$
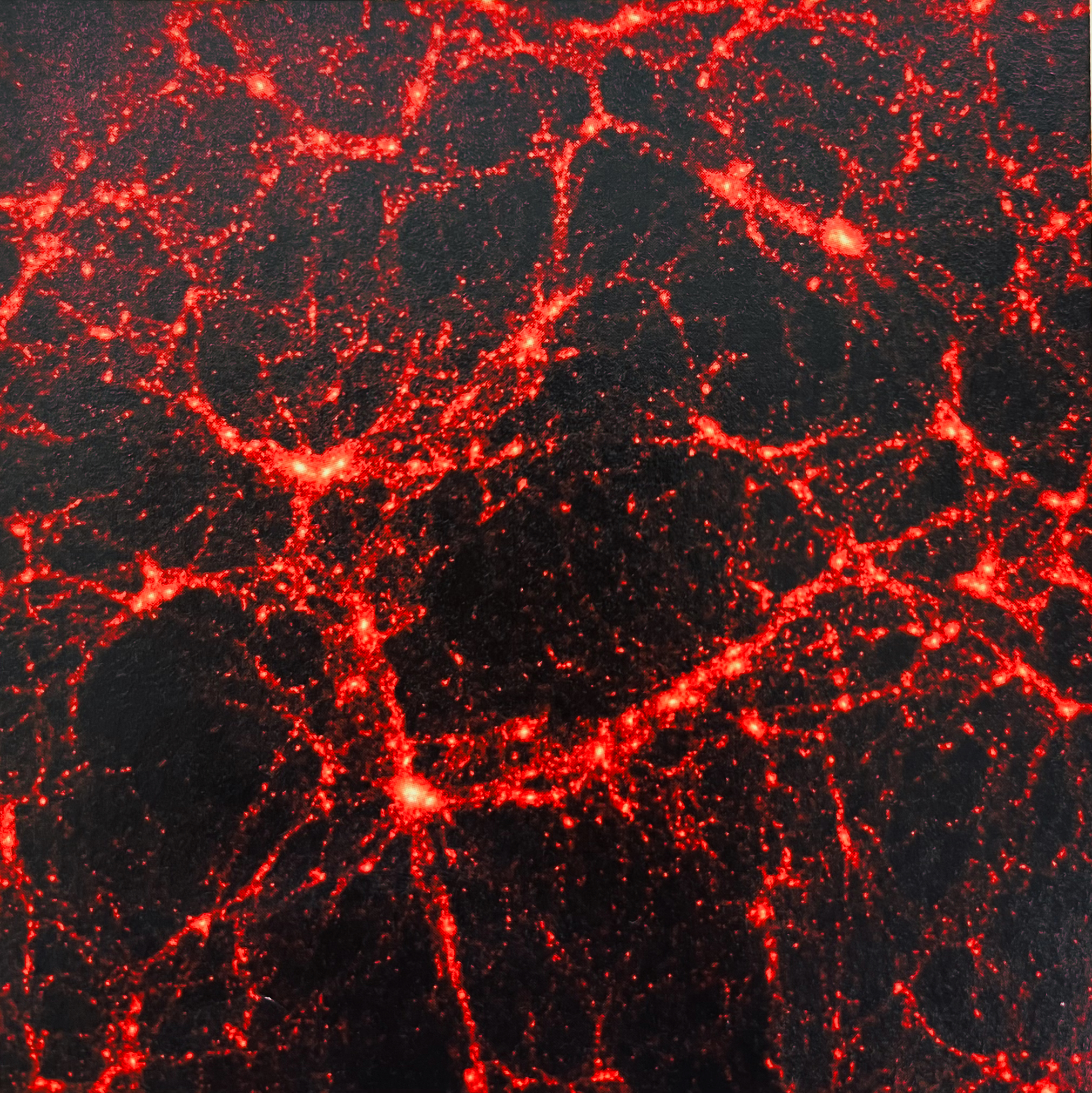
Density-based geometry
Density-based geometry
Let $\mathbb{X}_n = \{x_1,...,x_n\}\subseteq \mathbb{R}^D$ be a finite sample.

Density-based geometry
Let $\mathbb{X}_n = \{x_1,...,x_n\}\subseteq \mathbb{R}^D$ be a finite sample.
Assume that:
- $\mathbb{X}_n$ is a sample of a compact manifold $\mathcal M$ of dimension $d$.
- The points are sampled according to a density $f\colon \mathcal M\to \mathbb R$.
Density-based geometry
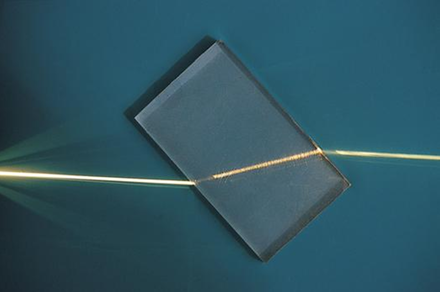


Fermat principle
The path taken by a ray between two given points is the path that can be traversed in the least time.
That is, it is the extreme of the functional \[ \gamma\mapsto \int_{0}^1\eta(\gamma_t)||\dot{\gamma}_t|| dt \] with $\eta$ is the refraction index.

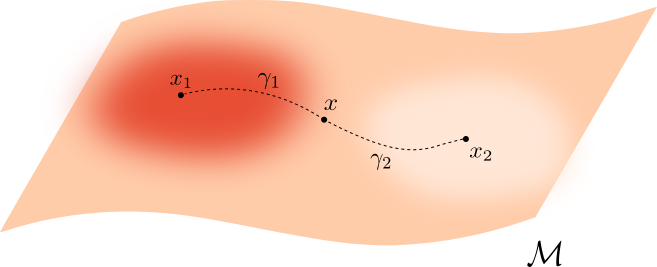
Density-based geometry
(Hwang, Damelin & Hero, 2016)
Let $\mathcal M \subseteq \mathbb{R}^D$ be a manifold and let $f\colon\mathcal{M}\to \mathbb{R}_{>0}$ be a smooth density.
For $q>0$, the deformed Riemannian distance* in $\mathcal{M}$ is \[d_{f,q}(x,y) = \inf_{\gamma} \int_{I}\frac{1}{f(\gamma_t)^{q}}||\dot{\gamma}_t|| dt \] over all $\gamma:I\to \mathcal{M}$ with $\gamma(0) = x$ and $\gamma(1)=y$.
* Here, if $g$ is the inherited Riemannian tensor, then $d_{f,q}$ is the Riemannian distance induced by $g_q= f^{-2q} g$.
Fermat distance
(Mckenzie & Damelin, 2019) (Groisman, Jonckheere & Sapienza, 2022)
Let $\mathbb{X}_n = \{x_1,...,x_n\}\subseteq \mathbb{R}^D$ be a finite sample.
For $p> 1$, the Fermat distance between $x,y\in \mathbb{R}^D$ is defined by \[ d_{\mathbb{X}_n, p}(x,y) = \inf_{\gamma} \sum_{i=0}^{r}|x_{i+1}-x_i|^{p} \] over all paths $\gamma=(x_0, \dots, x_{r+1})$ of finite length with $x_0=x$, $x_{r+1} = y$ and $\{x_1, x_2, \dots, x_{r}\}\subseteq \mathbb{X}_n$.
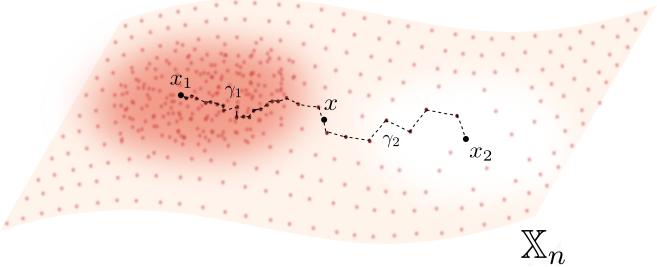
Fermat distance
Fermat distance
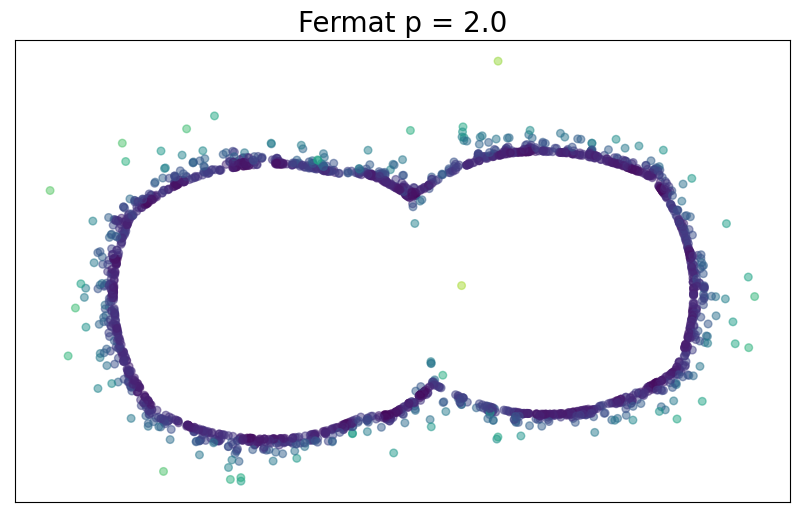
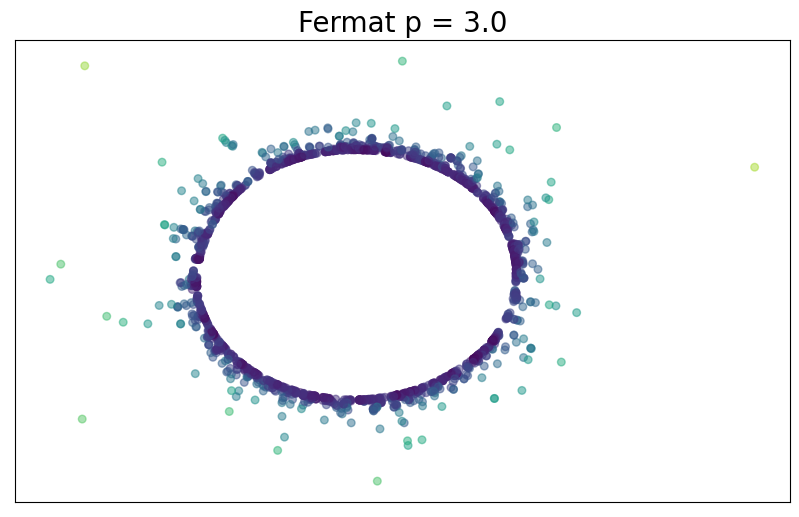
Fermat distance
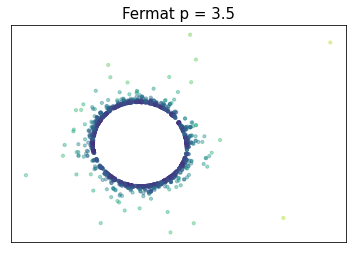
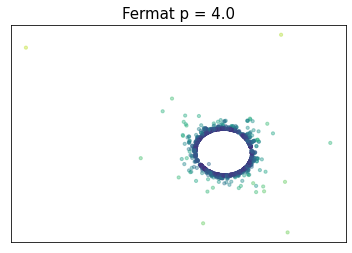
Convergence results
$d_{\mathbb X_n, p}$ is an estimator of $d_{f,q}$ if $q=(p-1)/d$.
Convergence results
(F., Borghini, Mindlin & Groisman, 2023)
Let $\mathcal{M}$ be a closed smooth $d$-dimensional manifold embedded in $\mathbb{R}^D$.
\[\big(\mathbb{X}_n, C(n,p,d) d_{\mathbb{X}_n,p}\big)\xrightarrow[n\to \infty]{GH}\big(\mathcal{M}, d_{f,q}\big) ~~~ \text{ for } q = (p-1)/d\]
Recall that $$d_{H}\big((X, d)(Y,d)\big) = \max \big\{\sup_{x\in X}d(x,Y), \sup_{y\in Y}d(X,y)\big\}, ~~\text{for }X,Y\subseteq (Z,d)$$ $$d_{GH}\big((X, d_X),(Y,d_Y)\big)= \inf_{\substack{Z \text{ metric space}\\ f:X\to Z, g:Y\to Z \text{ isometries}}}d_H(f(X), g(Y))$$

Convergence results
(F., Borghini, Mindlin & Groisman, 2023)
Let $\mathcal{M}$ be a closed smooth $d$-dimensional manifold embedded in $\mathbb{R}^D$.
\[\big(\mathbb{X}_n, C(n,p,d) d_{\mathbb{X}_n,p}\big)\xrightarrow[n\to \infty]{GH}\big(\mathcal{M}, d_{f,q}\big) ~~~ \text{ for } q = (p-1)/d\]
Theorem (F., Borghini, Mindlin, Groisman, 2023)
Let $\mathbb{X}_n$ be a sample of a closed manifold $\mathcal M$ of dimension $d$, drawn according to a density $f\colon \mathcal M\to \mathbb R$.
Given $p>1$ and $q=(p-1)/d$, there exists a constant $\mu = \mu(p,d)$ such that for every $\lambda \in \big((p-1)/pd, 1/d\big)$ and $\varepsilon>0$ there exist $\theta>0$ satisfying
\[
\mathbb{P}\left( d_{GH}\left(\big(\mathcal{M}, d_{f,q}\big), \big(\mathbb{X}_n, {\scriptstyle \frac{n^{q}}{\mu}} d_{\mathbb{X}_n, p}\big)\right) > \varepsilon \right) \leq \exp{\left(-\theta n^{(1 - \lambda d) /(d+2p)}\right)}
\]
for $n$ large enough.
Fermat-distance
Computational implementation
- Complexity:
$O(n^3)$
reducible to $O(n^2*k*\log(n))$ using the $k$-NN-graph (for $k = O(\log n)$ the geodesics belong to the $k$-NN graph with high probability).
- Python library:
fermat
- Computational experiments:
ximenafernandez/intrinsicPH
Persistent homology
Convergence of persistence diagrams
\[\big(\mathbb{X}_n, C(n,p,d) d_{\mathbb{X}_n,p}\big)\xrightarrow[n\to \infty]{GH}\big(\mathcal{M}, d_{f,q}\big) ~~~ \text{ for } q = (p-1)/d\]
+Stability \[d_B\Big( \mathrm{dgm}\big(\mathrm{Filt}(X, d_X)\big), \mathrm{dgm}\big(\mathrm{Filt}(Y, d_Y\big)\Big)\leq 2 d_{GH}\big((X,d_X),(Y,d_Y)\big)\]
Convergence of persistence diagrams
\[\big(\mathbb{X}_n, C(n,p,d) d_{\mathbb{X}_n,p})\big)\xrightarrow[n\to \infty]{GH}\big(\mathcal{M}, d_{f,q}\big) ~~~ \text{ for } q = (p-1)/d\]
+Stability \[d_B\Big( \mathrm{dgm}\big(\mathrm{Filt}(X, d_X)\big), \mathrm{dgm}\big(\mathrm{Filt}(Y, d_Y\big)\Big)\leq 2 d_{GH}\big((X,d_X),(Y,d_Y)\big)\]
$\Downarrow$\[\mathrm{dgm}(\mathrm{Filt}(\mathbb{X}_n, {C(n,p,d)} d_{\mathbb{X}_n,p}))\xrightarrow[n\to \infty]{B}\mathrm{dgm}(\mathrm{Filt}(\mathcal{M}, d_{f,q})) ~~~ \text{ for } q = (p-1)/d\]
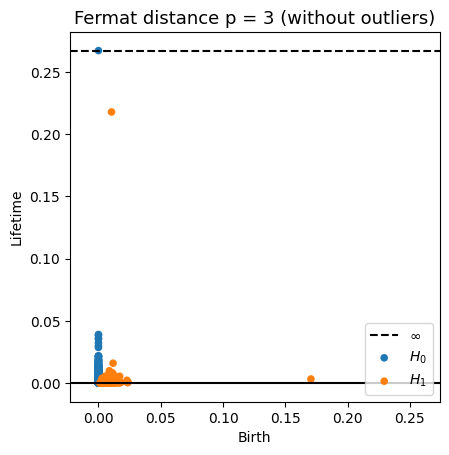
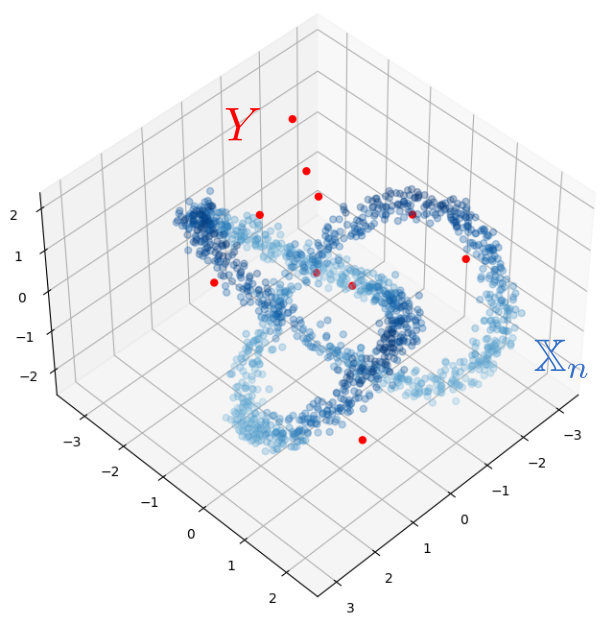
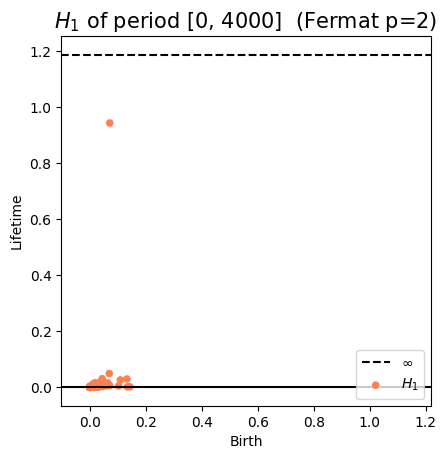
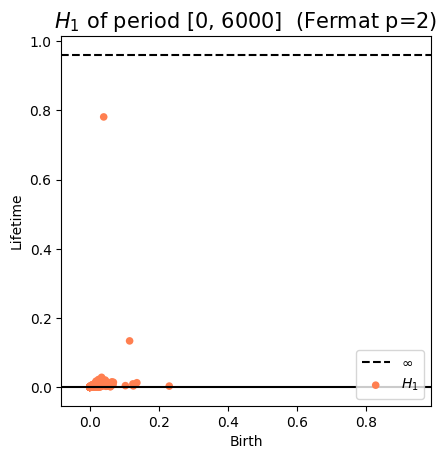
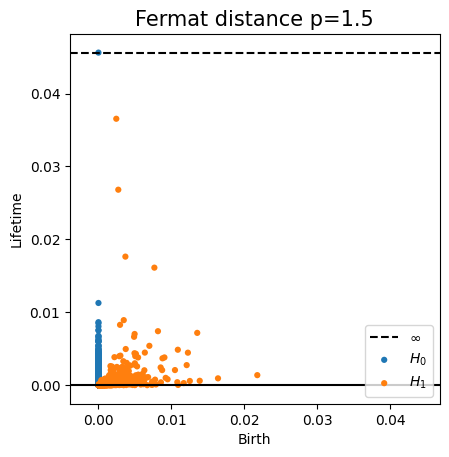
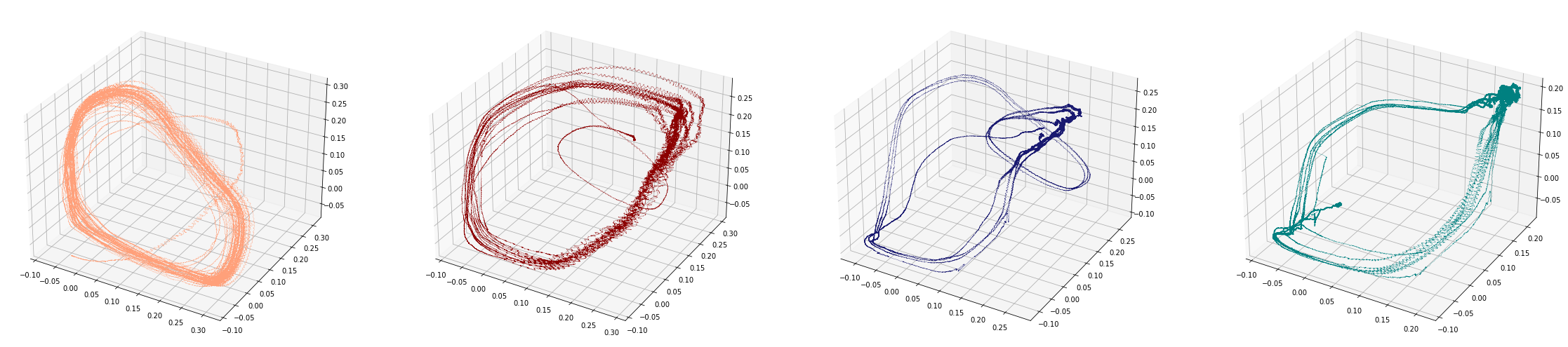
Fermat-based persistence diagrams
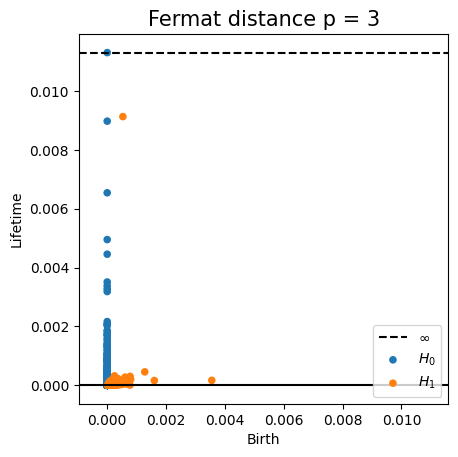
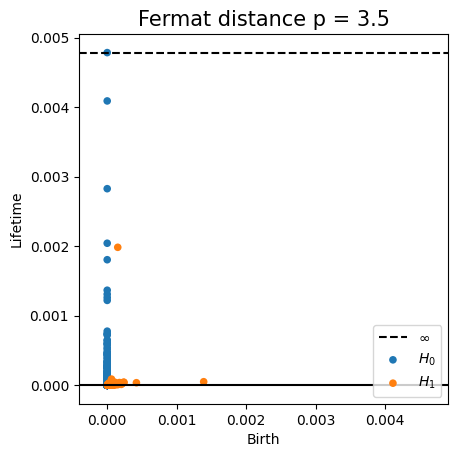
Fermat-based persistence diagrams
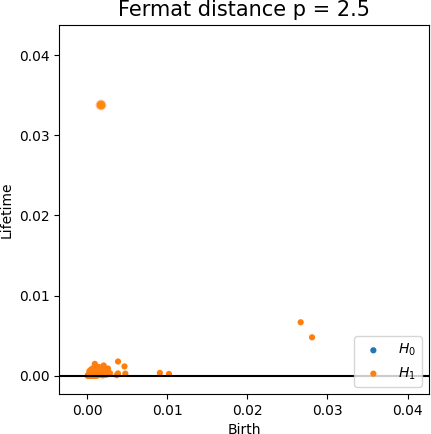
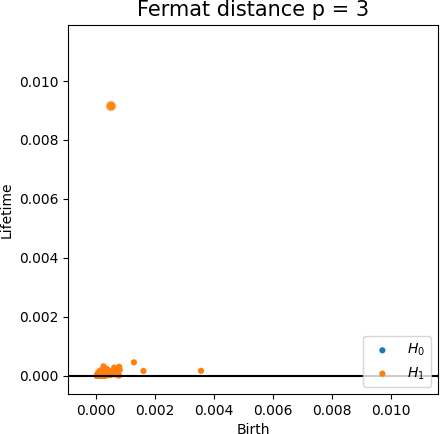
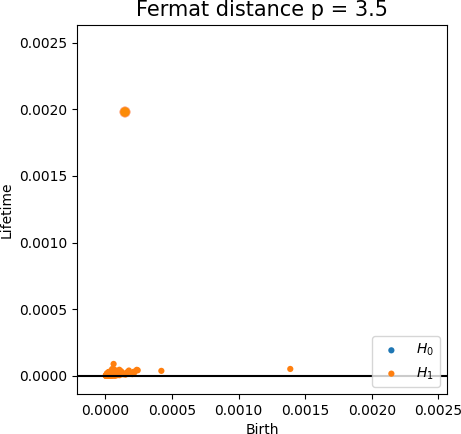
Fermat-based persistence diagrams
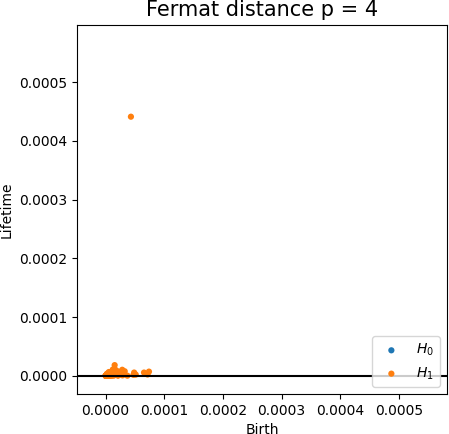
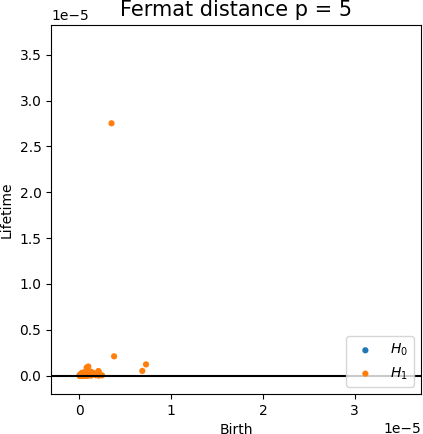
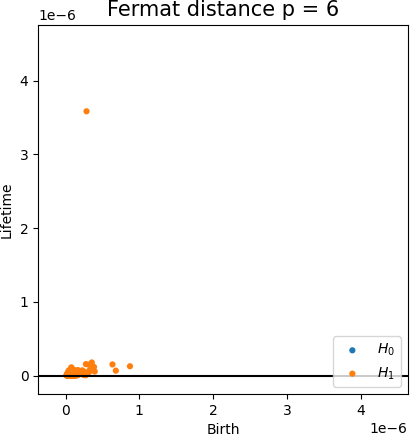
Fermat-based persistence diagrams
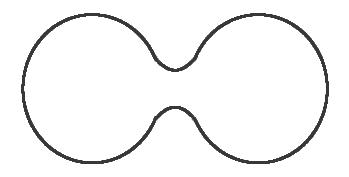
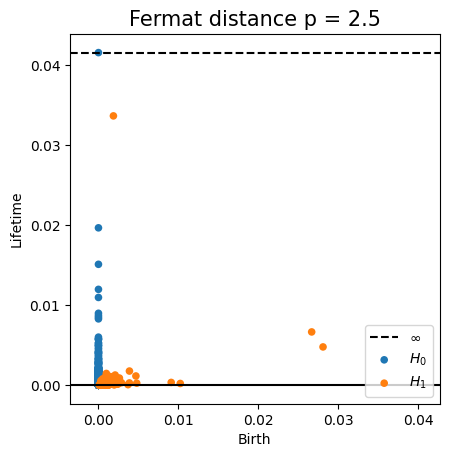
Intrinsic reconstruction
Fermat-based persistence diagrams
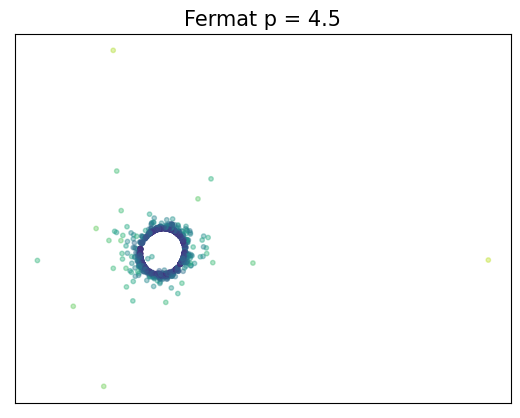
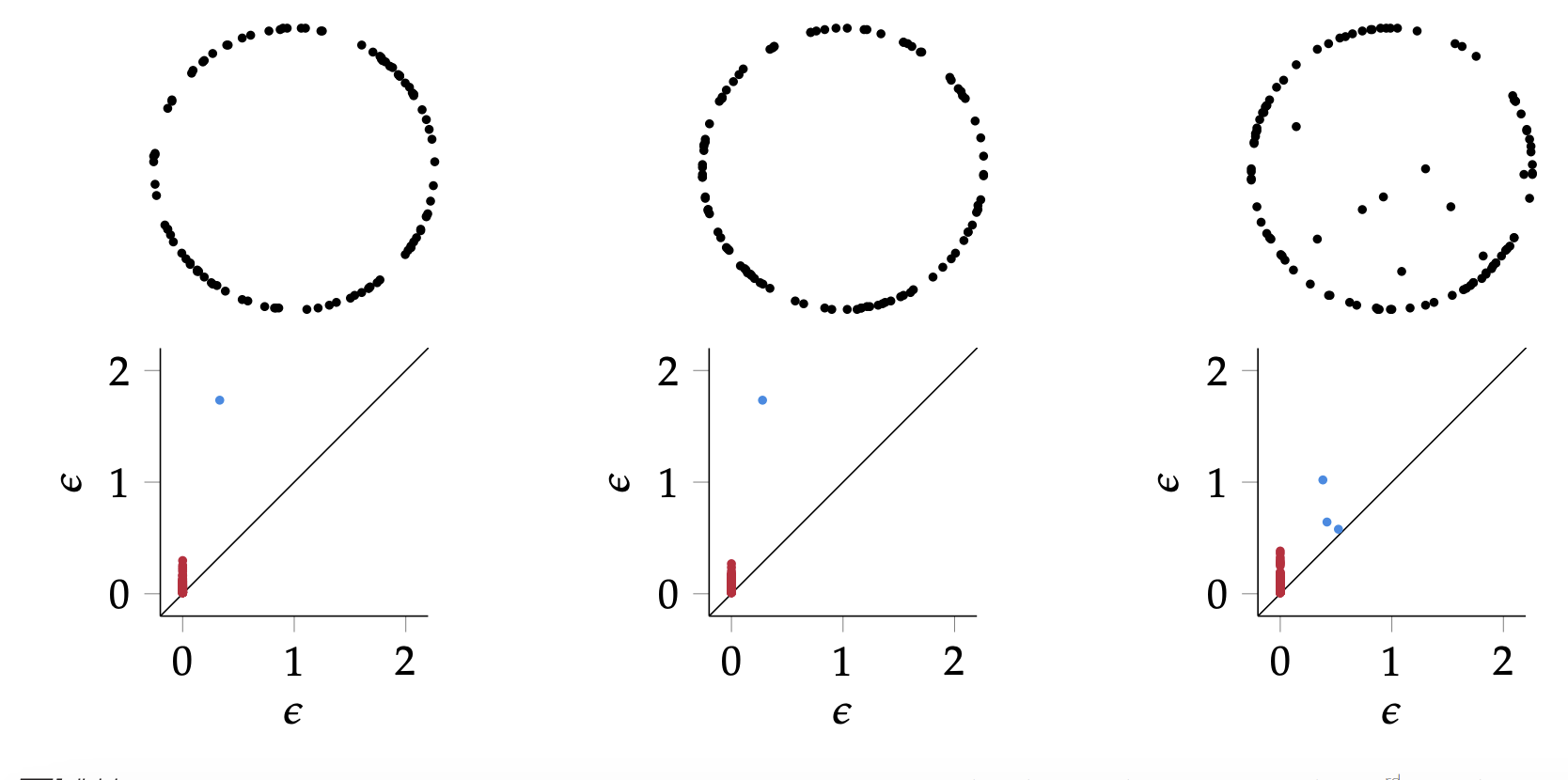
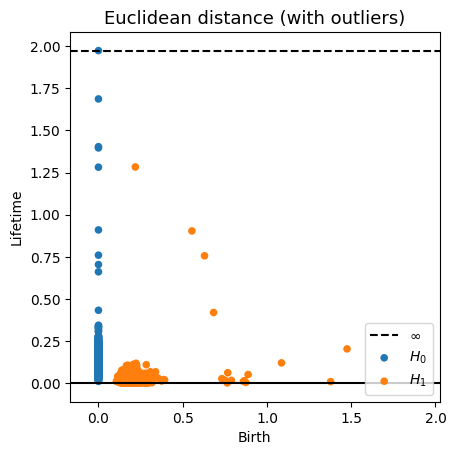
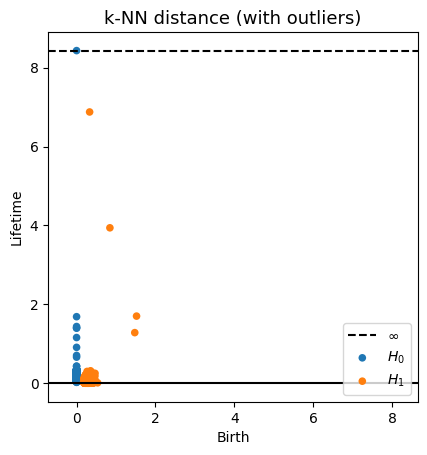
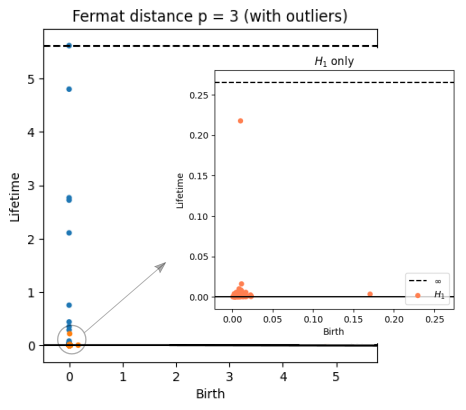
Robustness to outliers
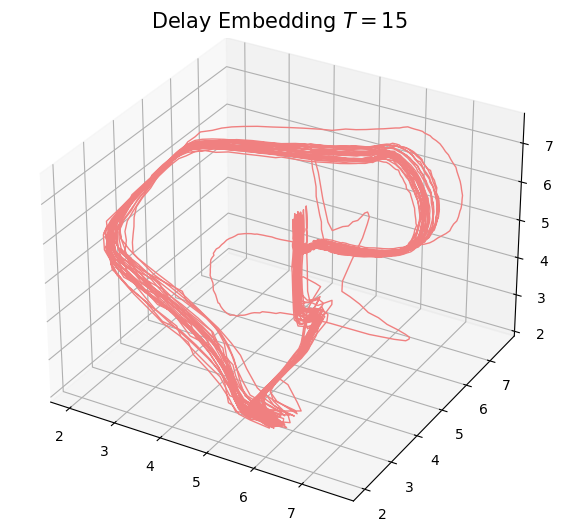
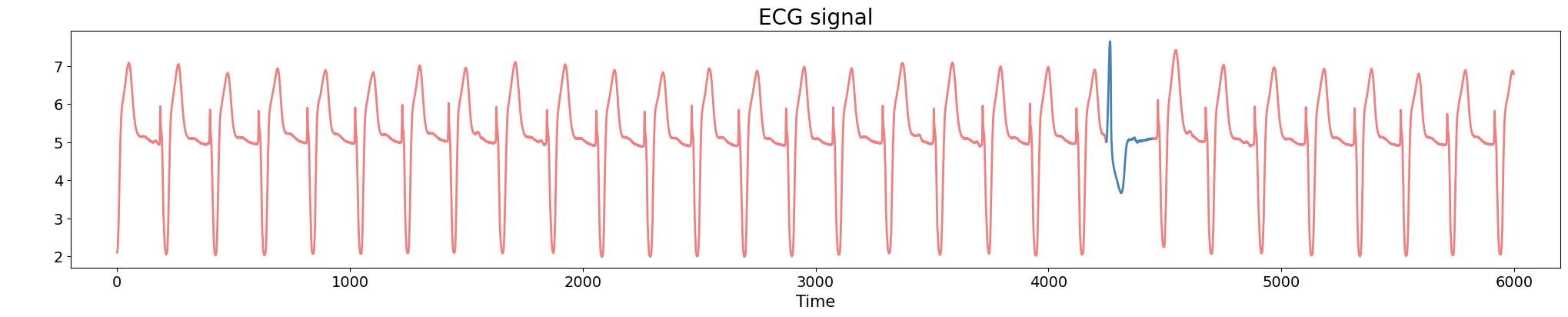
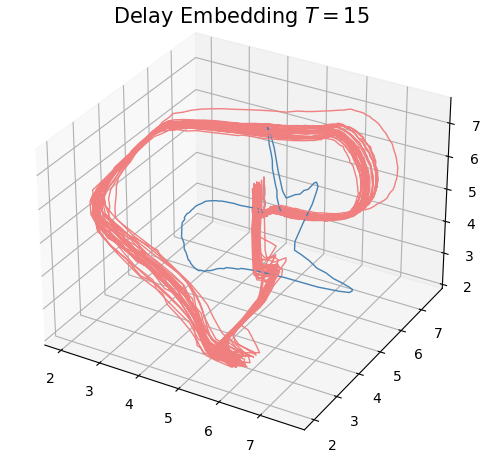
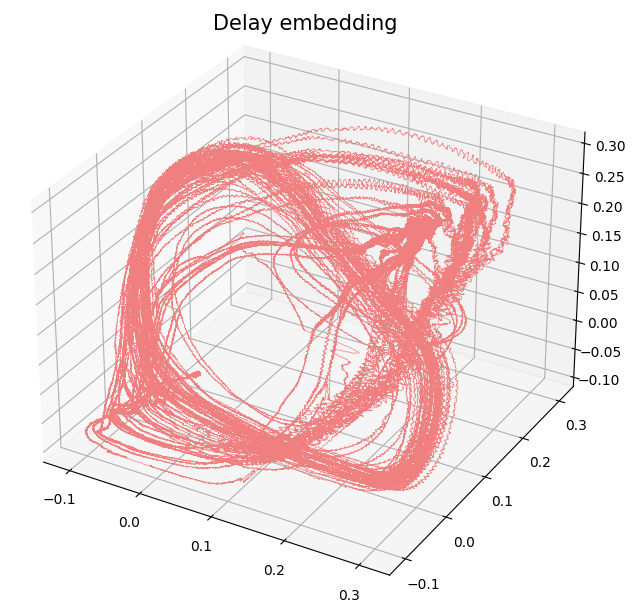
Application to time series Analysis
Anomaly detection
Electrocardiogram
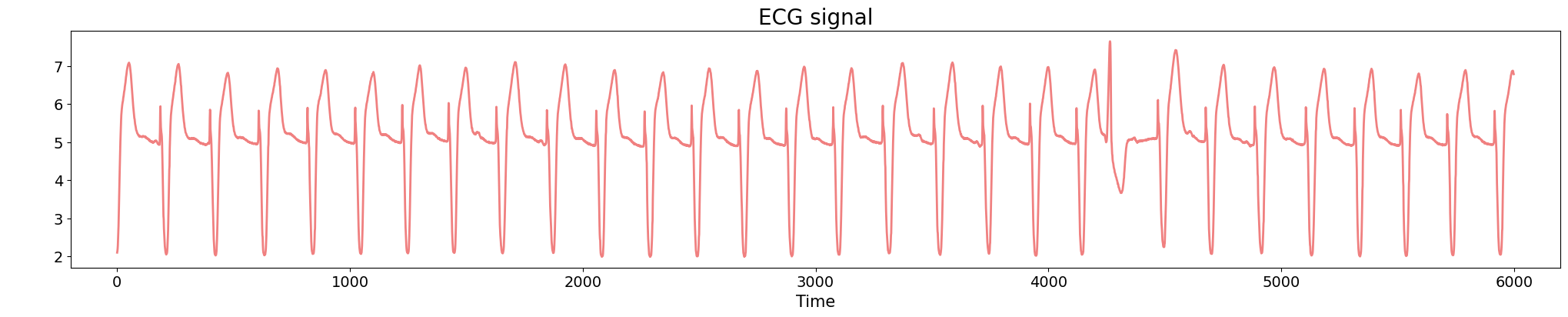
Source data: PhysioNet Database https://physionet.org/about/database/
Anomaly detection
Electrocardiogram
Anomaly detection
Electrocardiogram
Anomaly detection
Electrocardiogram
Anomaly detection
Electrocardiogram
\[t\mapsto \mathcal{D}_t\]
Approximate Derivative

Change-points detection
Birdsongs

Source data: Private experiments. Laboratory of Dynamical Systems, University of Buenos Aires.
Change-points detection
Birdsongs
Change-points detection
Birdsongs
Change-points detection
Birdsongs

Change-points detection
Birdsongs

Future work
References
- Source: X. Fernandez, E. Borghini, G. Mindlin, P. Groisman. Intrinsic persistent homology via density-based metric learning. Journal of Machine Learning Research 24(75):1−42 (2023).
- Github Repository: ximenafernandez/intrinsicPH
- Tutorial: Intrinsic persistent homology. AATRN Youtube Channel (2021)
- Python Library: fermat